BMS充电系统
2019-11-07 15:15:29
途灵机器人
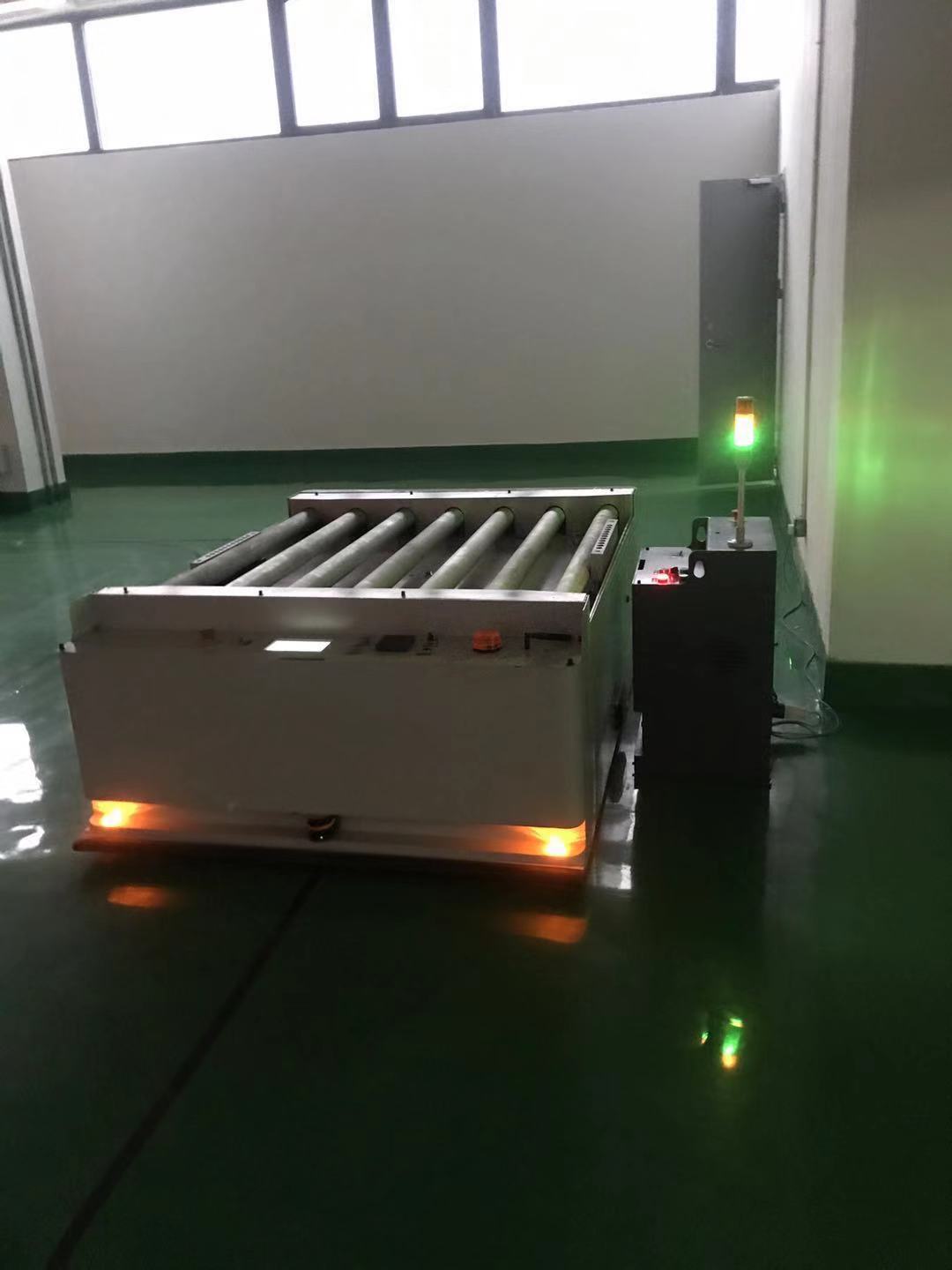
途灵AGV充电系统采用一对多充电模式。以1号AGV为例进行充电过程描述:当1号AGV车载电池电量下降到某一设定阈值时,1号AGV将向1号充电位接近进行充电。在接近过程中,1号充电机通过wifi无线网络获得1号电池包BMS的电池参数信息,并做好充电准备。当1号AGV到达正确充电位置后发到位状态量到车载CAN-WiFi模块,模块采集到该信号后通过WIFI向1号充电机发送到位干接点信号。同时充电机通过光电传感器采集AGV的到位信号。如果AGV到位则充电机与BMS进行握手,握手完成后BMS闭合电池充电开关,充电机检测到电池电压后启动充电。充电启动后,充电机与BMS实时交换充电信息,车载CAN-WiFi模块闭合充电状态干接点通知1号AGV现正处于充电过程中。当充电时间到或电池充满后,充电机停止输出,BMS断开充电开关,车载CAN-WiFi模块通过断开充电状态干接点通知AGV充电过程结束,AGV此时可以离开充电点。在充电过程中AGV也可以通过断开到位干接点信号通知充电机停止对电池充电。